CASE STUDY
CASE 17
人手不足対応
ロボットによるネジ締め自動化
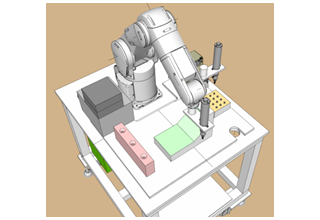
ロボットによるネジ締め自動化システム導入
→斜め、横のような複雑なネジ締めを実現!
→ドライバービットの自動交換で多品種対応!
→トルク制御とデータ収集による品質トレーサビリティ対応!
複雑な作業を自動化できないだろうか!
電子部品メーカーからのご相談です。少子高齢化に伴い、作業者の確保が難しくなってきており、何度か自動化の検討をされましたが、複数のネジサイズで斜めや横からのネジ締め作業があり自動化は難しい状況でした。
※上記のようなお客様の課題を解決するために開発しました。
斜めや横からのネジ締め作業は人手でも難しい
様々なネジサイズがあり段取り替えに時間がかかる
人手で作業を行っているため品質にばらつきがある
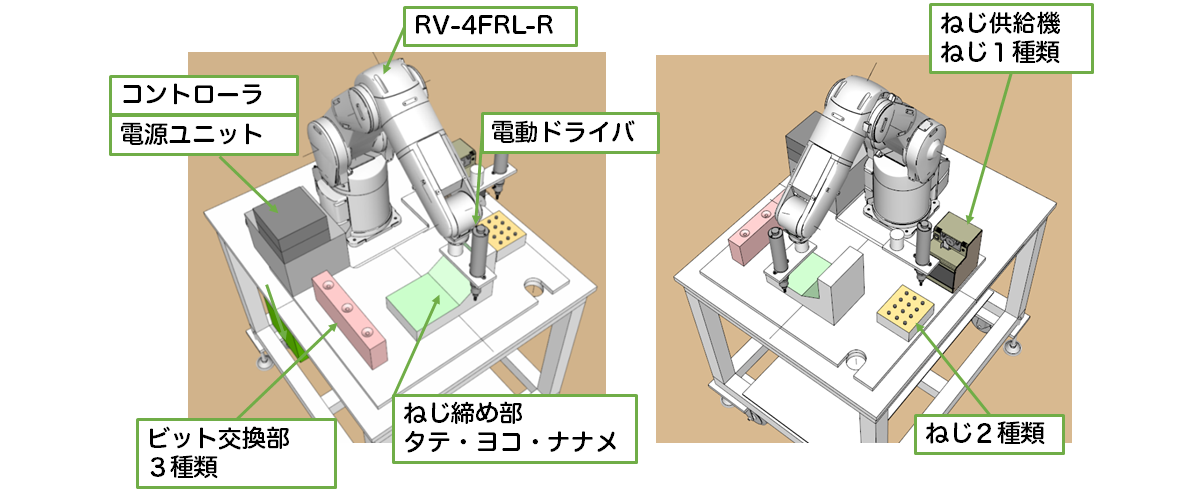
小型垂直多関節ロボット導入複雑な動作可能に!
ハンド交換不要ドライバービット(※)交換でサイズ違いのワークに対応
シーケンサ連携部品ごとのトルク管理の実現
※ドライバービットとは、電動ドライバーの先端に取り付けるパーツ。ネジの種類により交換が必要。
①複雑な組立動作
作業ごとに専用機が必要とされるような複雑な組立作業を小型垂直多関節
ロボットの自由度、広動作範囲を生かすことによって低コストで実現。
②異種ワークに対するハンド交換不要
自動でドライバービット交換可能。ビットサイズの異なるワークにも対応。
通常異なるワークでそれぞれドライバを用意する必要があるが、ドライバービットの交換のみに
できることでコスト削減を実現
③自動化組立による高品質
ロボットの高精度繰り返し動作による組立品質の均一化を実現。
追加機能としてトルク制御とトルク実績収集による品質トレーサビリティ対応